Diffusion models like Dall-E of Openai are becoming more and more useful to help think about new conceptions. Humans can encourage these systems to generate an image, create a video or refine a plan and come back with ideas that they had not considered before.
But did you know that the generative models of artificial intelligence (GENAI) also make progress in the creation of work robots? Recent Diffusion -based approaches have generated structures and systems that control them from zero. With or without a user input, these models can make new conceptions, then assess them in simulation before being manufactured.
A new approach to the computer intelligence laboratory and artificial MIT (CSAIL) artificial intelligence applies this generative know-how to improve robotic drawings of humans. Users can write a 3D model of a robot and specify which parts they would like to see a modification model modify, providing its dimensions beforehand. Genai then reflects on the optimal form of these areas and tests his ideas in the simulation. When the system finds the right design, you can save and then make a work robot and a real world with a 3D printer, without requiring additional adjustments.
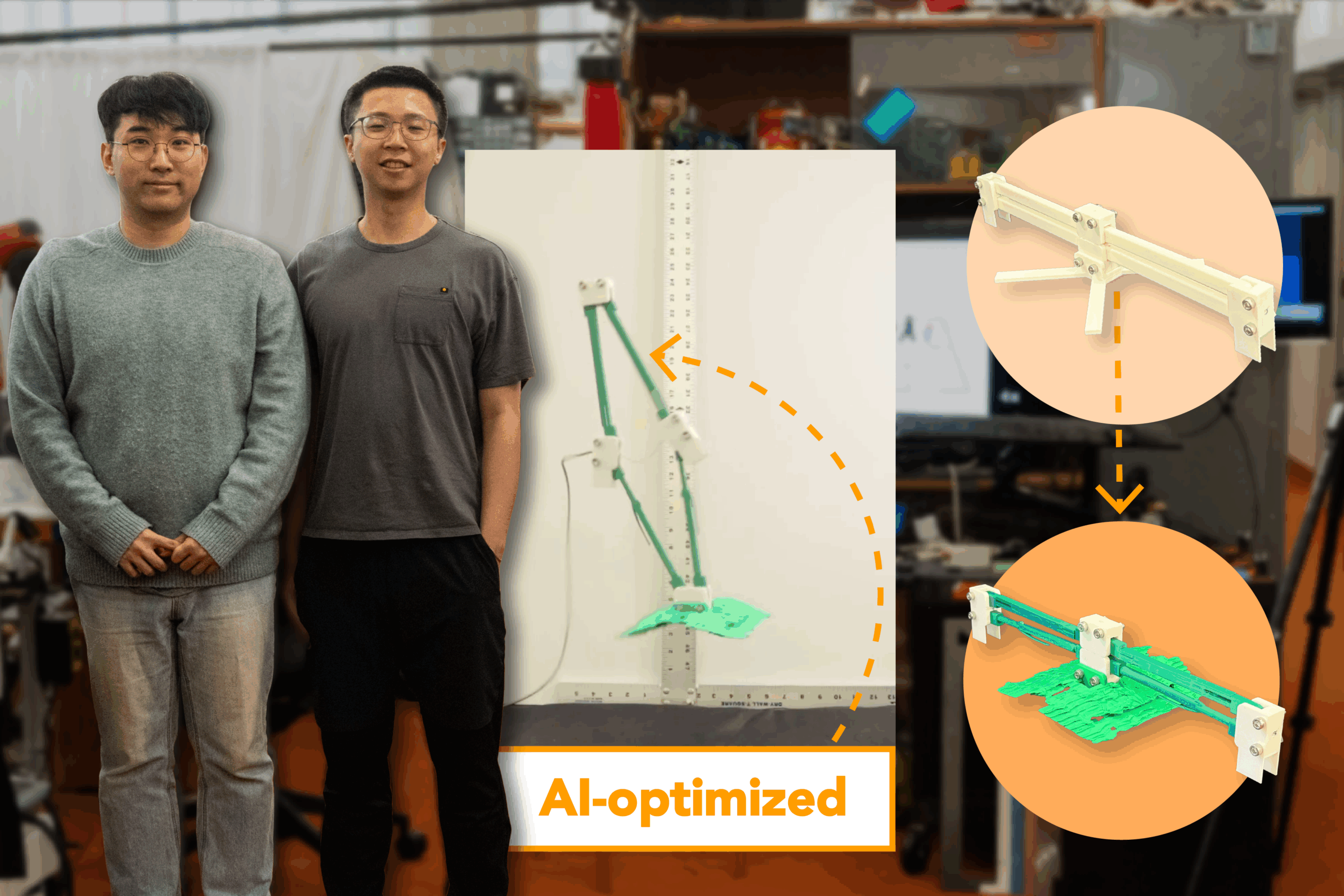
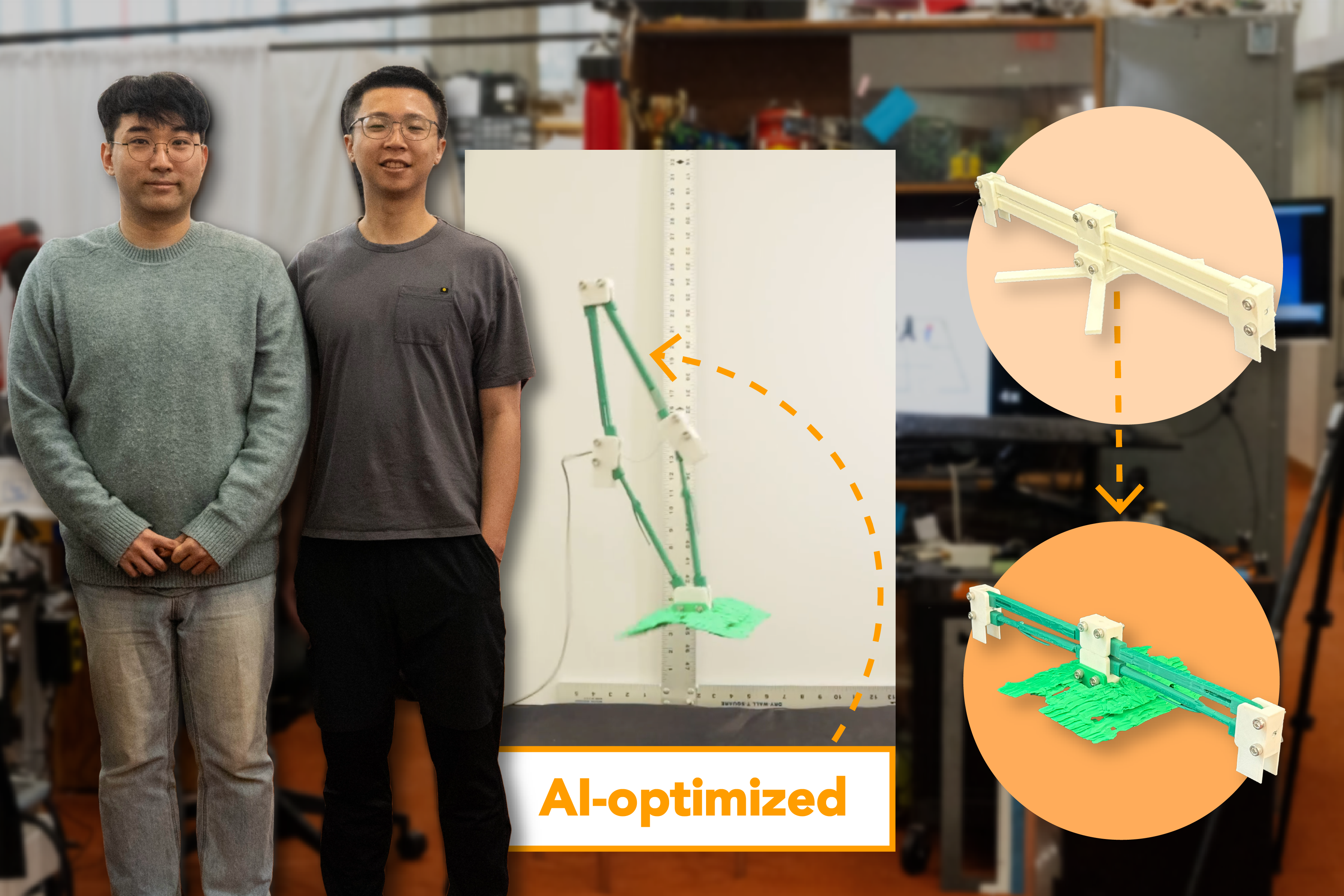
The researchers used this approach to create a robot which jumped on average by about 2 feet, or 41% higher than a similar machine that they created by themselves. The machines are almost identical in appearance: they are both composed of a type of plastic called polylactic acid, and although they initially appear flat, they spring up in the shape of a diamond when an engine pulls on the cord attached to them. So, what did AI do exactly differently?
A more in -depth examination reveals that the links generated by AI are curved and resemble thick covers (the music instruments of music uses), while the connection parts of the standard robot are straight and rectangular.
Better Blobs
The researchers began to refine their jump robot by sampling 500 potential conceptions using an initial integration vector – a digital representation which captures high -level characteristics to guide the conceptions generated by the AI model. From these, they selected the 12 main options according to the performance of the simulation and used them to optimize the integration vector.
This process has been repeated five times, gradually guiding the AI model to generate better conceptions. The resulting design looked like a blob, so the researchers prompted their system to develop the project to adapt to their 3D model. They then made the form, noting that this improved the robot jump capacities.
The advantage of using distribution models for this task, according to the co-driven author and CSAIL Postdoc byungchul Kim, is that they can find unconventional solutions to refine robots.
“We wanted to blow up our machine higher, so we thought that we could simply make the links connect his pieces as thin as possible to make them light,” explains Kim. “However, such a thin structure can easily break if we simply use 3D printed equipment. Our diffusion model has had a better idea by suggesting a unique form which allowed the robot to store more energy before jumping, without making links too thin. This creativity helped us discover the underlying physics of the machine.”
The team then instructed its system to write an optimized foot to make sure it landed safely. They repeated the optimization process, possibly choosing the most efficient design to fix themselves at the bottom of their machine. Kim and his colleagues found that their machine designed by AI had fallen much less often than its basic line, up to an improvement of 84%.
The capacity of the diffusion model to upgrade the skills of jumping and landing a robot suggests that it could be useful to improve the design of other machines. For example, a company working on manufacturing or household robots could use a similar approach to improve their prototypes, which saves engineers normally reserved for the iteration of these changes.
Balance behind the rebound
To create a robot that could jump high and land in a stable way, the researchers admitted that they had to find a balance between the two objectives. They represented both the jump height and the success rate of landing as digital data, then resulted in their system to find an ideal point between the two integration vectors that could help build an optimal 3D structure.
The researchers note that if this robot assisted by the AI has surpassed its counterpart designed by man, it could soon reach new even more important heights. This iteration involved using materials compatible with a 3D printer, but the future versions would jump even higher with lighter materials.
The co-directed and student doctoral student MIT CSAIL TSUN-HSUAN “Johnson” WANG says that the project is a starting point for new robotics conceptions that generative AI could help.
“We want to walk around more flexible goals,” says Wang. “Imagine using natural language to guide a diffusion model to write a robot that can pick up a cup or operate an electric drill.”
Kim says that a diffusion model could also help generate an articulation and ideas on how the parts connect, potentially improving the robot height. The team also explores the possibility of adding more engines to control the steering than the machine jumps and perhaps improve its landing stability.
The work of researchers was supported, in part, by the Emerging Frontiers in Research and Innovation program of the National Science Foundation, the Manus and Machina program of the Singapore Mit Alliance for Research and Technology (GIST) -Csail Collaboration. They presented their work at the international conference of 2025 on robotics and automation.