In -depth learning formula for robots
MIT scientists have in fact created a formula to help engineers design a gentle robotics that collect more useful details regarding their environment. The in -depth learning formula suggests an improved positioning of the sensors in the robot body, allowing it to better communicate with its framework and its complete designated work. Development is a step towards automation of robotic design. “The system discovers not only a task provided, but also how the robot style to correct this task,” says Alexander Amini. “The positioning of the detection unit is a really difficult problem to solve. So having this option is incredibly exciting.”
The study will certainly exist throughout the international seminar of the IEEE in April on sweet robotics as well as the journal IEEE ROBOTICS and also automation letters. The co-writers are amini and also Andrew Spielberg, both doctoral students in the research laboratory on computer science and artificial intelligence (CSAIL). Various other co-authors are composed of the doctoral student of Mit Lillian Chin, as well as Wojciech Matasik and Daniela Rus teachers.
The creation of soft robots which complete the works of the real world has been a long -standing difficulty in robotics. Their rigid counterparts have an integrated advantage: a variety of limited activity. The finite selection of the joints of rigid robotics as well as members generally produces practical estimates by algorithms which control mapping as well as movement planning. The soft robots are not so treatable.
Robotics adaptable to flexible body
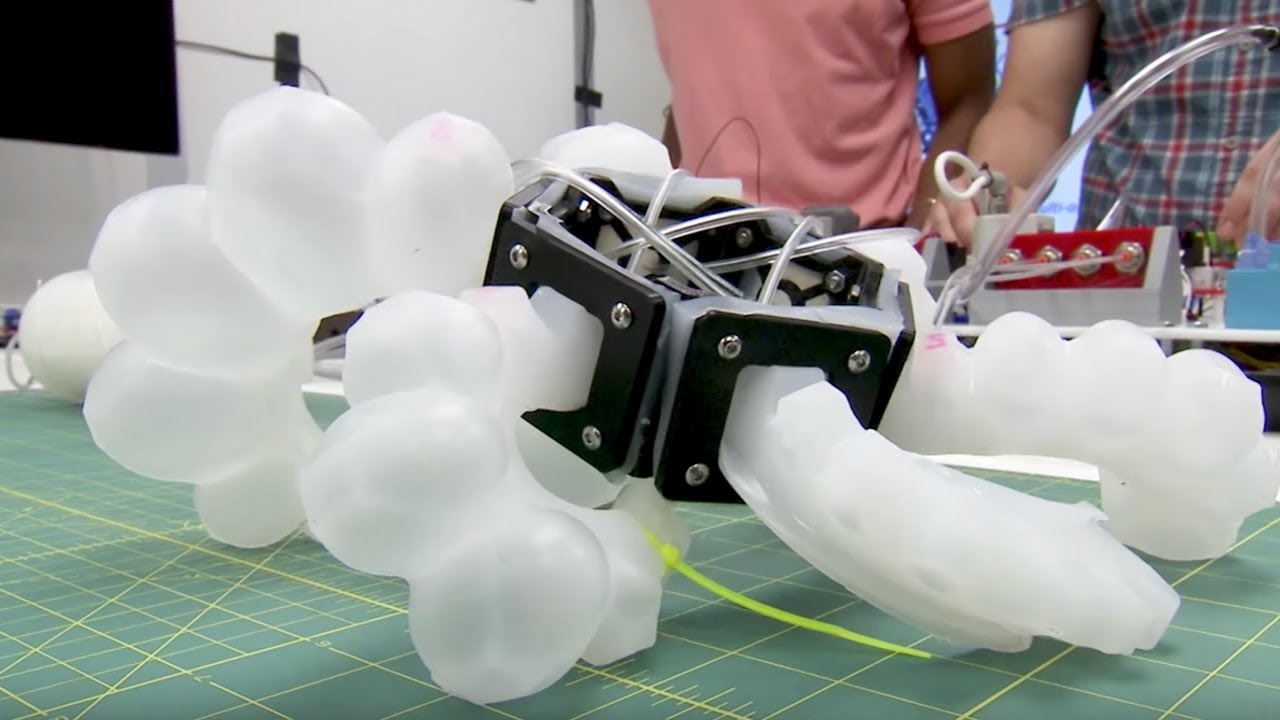
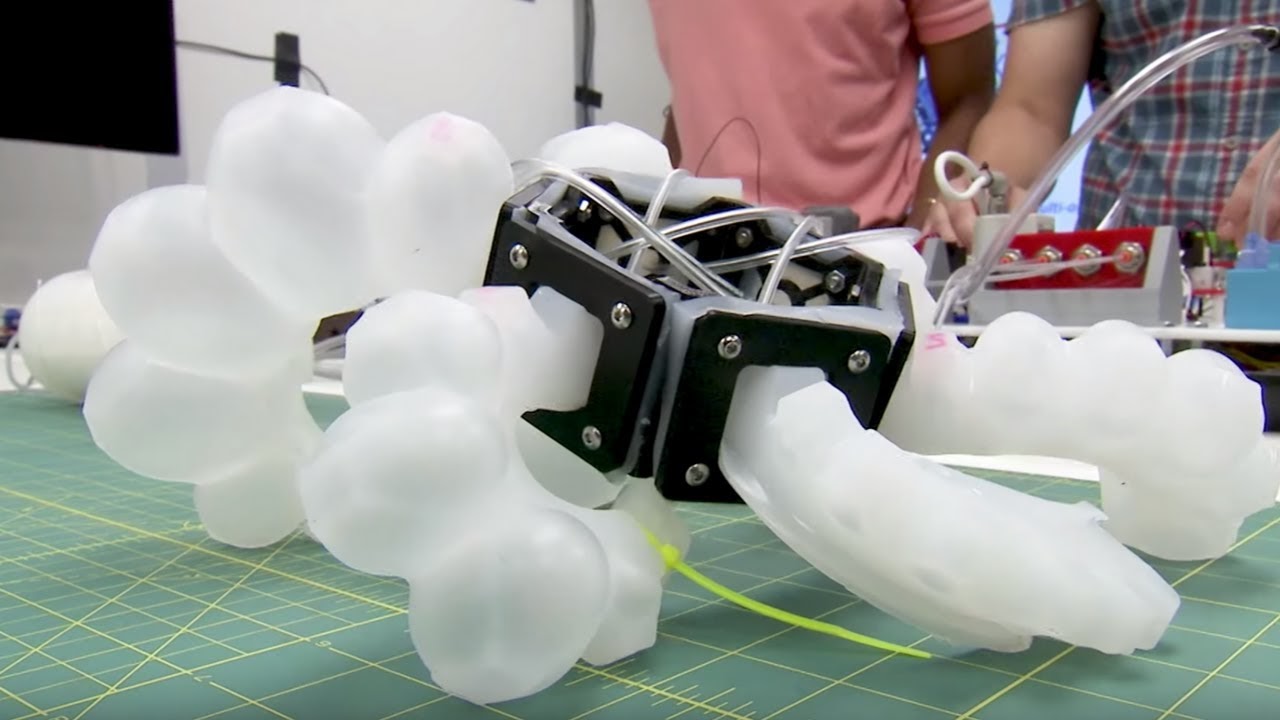
Flexible body robotics is adaptable and flexible – they generally look much more like a living sphere than a bowling alley. “The major problem of sweet robotics is that they are infinitely dimensional,” says Spielberg. “Any type of point on a soft body robotics can, theoretically, a defect by all possible means.” That the drawbacks make a gentle robotic that can map the location of its body components. The past efforts have actually used an outdoor camera to draw the robot position and strengthen this information directly in the robot control program. However, the researchers intended to create a soft robotics not attached from external aid.

“You cannot put an infinite variety of detection units on the robot itself,” says Spielberg. “So the question is: the quantity of detection units have you, as well as where do you place these sensors in order to make the most of your money?” The group looked too deep for an answer.
Semantic network
The researchers have developed a unique semantic network style that maximizes sensors' placement and discovers to effectively finish jobs. Initially, scientists divide the robot body into regions called “particles”. The deformation rate of each particle has been proposed as entry to the semantic network. Via a process of tests and errors, the network “discovers” one of the most effective sequences of movements to complete the tasks, such as striking objects of different dimensions. At the same time, the network follows the fragments most often used most often, as it chooses the less used fragments of all the inputs for the following tests of the networks.
By maximizing the most crucial particles, the network also suggests where the sensors must be positioned on the robotics to guarantee reliable performance. For example, in a substitute robot by a hand input, the formula could recommend that the sensors be concentrated in and around the fingers, where communications specifically controlled with the frame are crucial for the robot's ability to handle objects. Although it may seem obvious, it turns out that the algorithm has considerably exceeded people's intuition in the place where the detection units.
The researchers opposed their formula compared to a collection of expert forecasts. For three soft robot provisions, the group asked the Roboticists to choose by hand where the sensors must be placed to allow the effective conclusion of jobs such as the seizure of many objects. After that, they led simulations contrasting robotics sensitive to man with robots sensitive to algorithm. As well as the results were not close. “Our conception has greatly exceeded humans for each task, even if I looked at several of the bodies of the robots and I also felt very confident on the place where the detection units must go,” said Amini. “It turns out that there are many more subtleties in this problem than we initially planned.”
Automated process
Spielberg indicates that their work can help automate the robotic style process. In addition to creating formulas to manage the movements of a robot, “we also have to think exactly how we are most likely to capture these robotics, and exactly how it will certainly interact with other elements of this system,” he said. As well as much better, the sensor placement could have commercial applications, especially when robots are used for beautiful work such as entering. “This is something where you need an extremely robust and well -optimized sense of touch,” said Spielberg. “So there is a possibility of immediate impact.”
“Automation of the style of sweet sensory robots is an essential action to quickly produce smart devices that help people with physical tasks,” said Rus. “The detection units are a crucial element of the process, because they allow the sweet robot to” see “as well as to recognize the world and also its partnership with the globe”.
This research was funded, in part, by the National Scientific Research Foundation as well as by the Fannie and John Hertz structure.