
Introduction to Robotics based on learning
Robotic control systems have made significant progress through methods that replace hand -based learning -based learning. Instead of counting on explicit programming, modern robots learn by observing actions and imitating them. This form of learning, often based on behavioral cloning, allows robots to operate effectively in structured environments. However, the transfer of these behaviors learned in dynamic and real scenarios remains a challenge. Robots must not only repeat actions, but also to adapt and refine their responses when confronted with unknown tasks or environments, which is essential for achieving general autonomous behavior.
Challenges with traditional behavioral cloning
One of the main limits of learning robotic policies is dependence on pre-collective human manifestations. These demonstrations are used to create initial policies thanks to supervised learning. However, when these policies fail to generalize or accurately perform in new parameters, additional demonstrations are necessary to recycle them, which is a process with a high intensity of resources. The inability to improve policies using the robot's own experiences leads to ineffective adaptation. Learning strengthening can facilitate autonomous improvement; However, its sample of ineffectiveness and dependence on direct access to complex strategy models make it unsuitable for many real deployments.
Limits of current dissemination-RL integration
Various methods have tried to combine policies based on dissemination with learning to strengthen to refine the behavior of robots. Some efforts have focused on modifying the first stages of the dissemination process or the application of additive adjustments to strategy outputs. Others have tried to optimize the actions by assessing the rewards expected during the stages of the deforestation. Although these approaches have improved results in simulated environments, they require in -depth calculation and direct access to policy parameters, which limits their practicality for black or owner box models. In addition, they have trouble with the instability which comes from retro-propagation through diffusion chains in several stages.
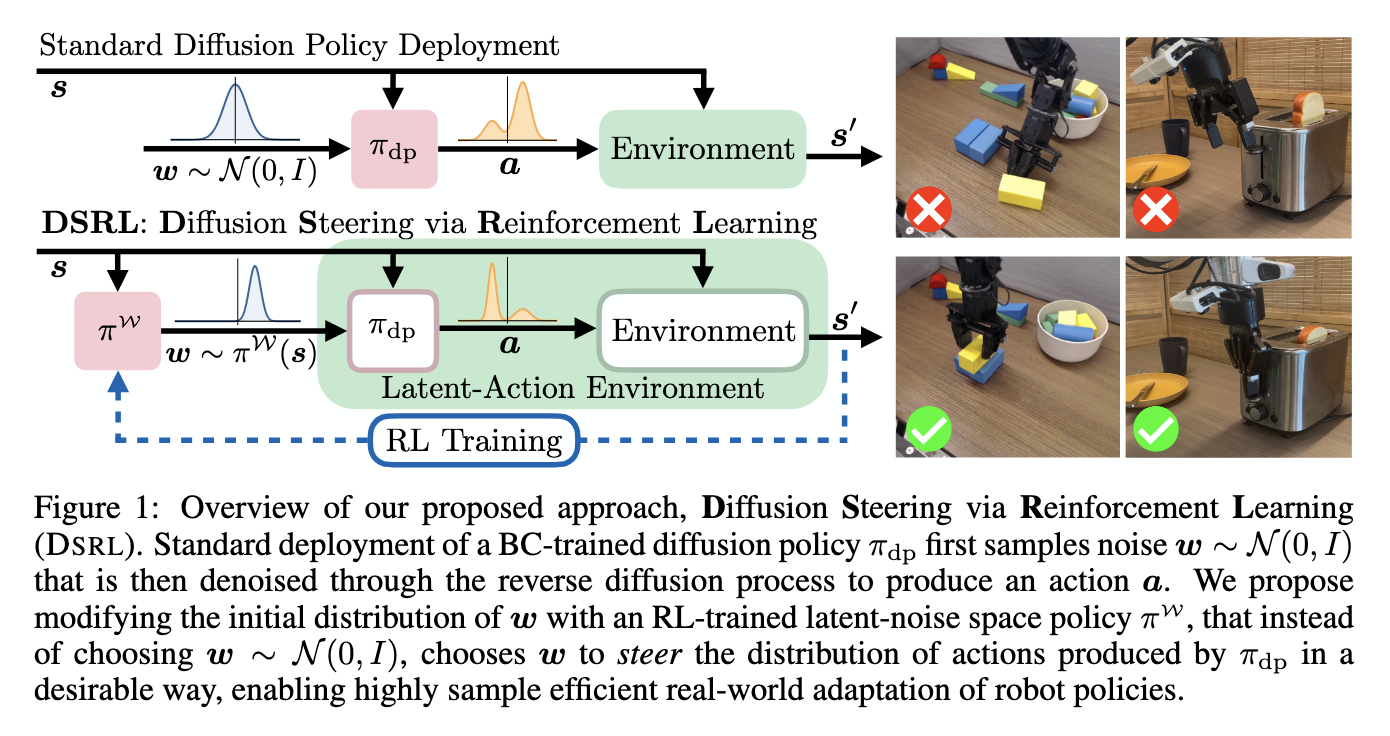
DSRL: an optimization framework for latent noise policies
Researchers from UC Berkeley, Washington University, and Amazon presented a technique called Directorate of Diffusion via strengthening learning (DSRL). This method moves the process of adapting the modification of policy weights to the optimization of the latent noise used in the diffusion model. Instead of generating actions from a fixed Gaussian distribution, DSRL forms a secondary policy which selects the entry noise in a manner which directs the resulting actions towards desirable results. This allows learning to strengthen effectively refine behavior without modifying the basic model or require internal access.

Of space and latent noise policy
The researchers restructured the learning environment by mapping the original action space to a latent noise space. In this transformed configuration, the actions are indirectly selected by choosing the latent noise that will produce them through the diffusion policy. By treating noise as the action variable, DSRL creates a strengthening learning framework which works entirely outside the basic policy, using only its outputs at the front. This design makes it adaptable to robotic systems in the real world where only access to the black box is available. The policy that selects latent noise can be formed using standard actor-critical methods, thus avoiding the cost of calculating retro-propagation through diffusion stages. The approach allows both online learning thanks to real-time interactions and offline learning from pre-collected data.
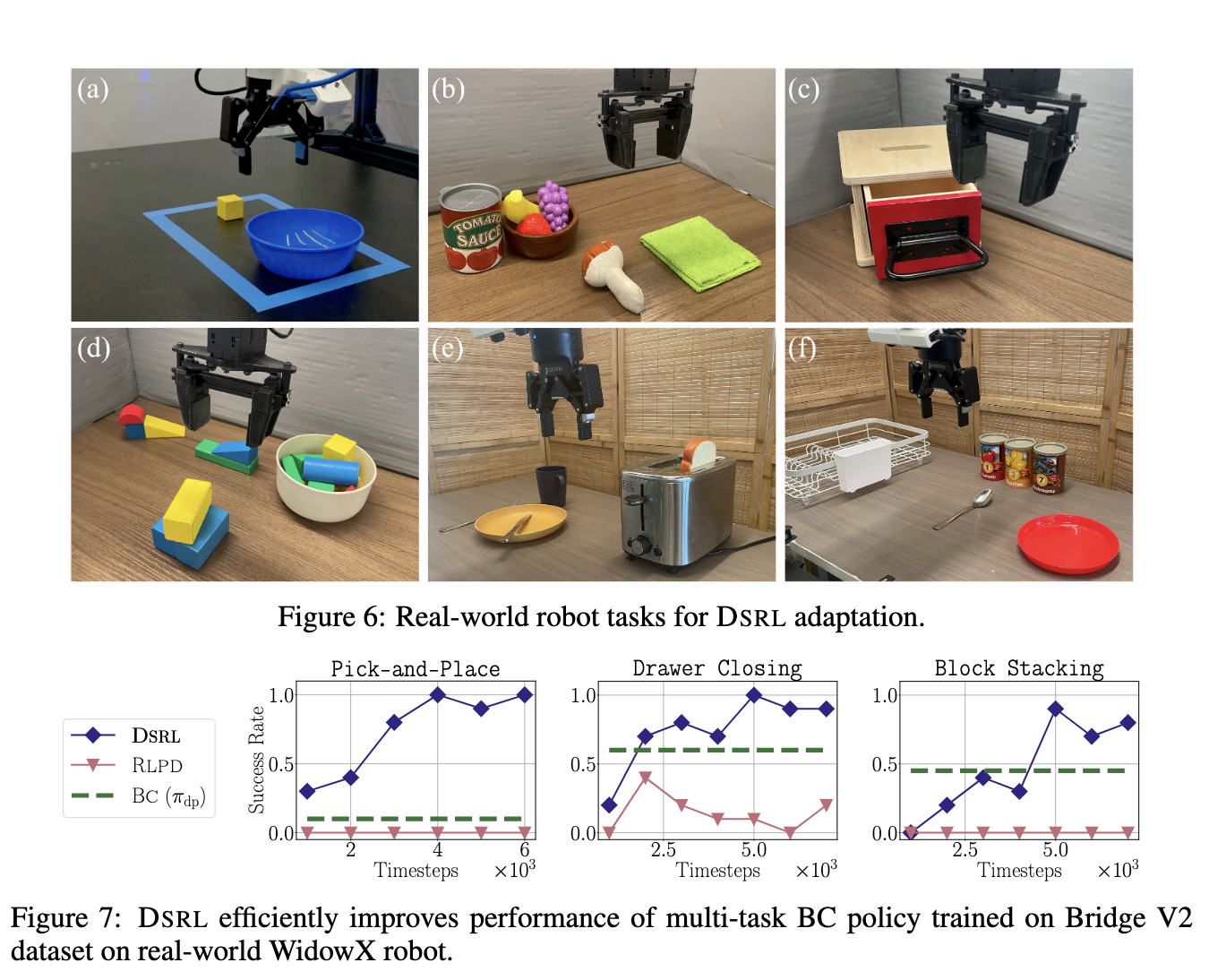
Empirical results and practical advantages
The proposed method has shown clear improvements in performance and data efficiency. For example, in a real world robotic task, DSRL has improved tasks success rates from 20% to 90% in less than 50 online interaction episodes. This represents an increase in performance for more than four years with a minimum of data. The method was also tested on a generalist robotic policy called π₀, and DSRL was able to effectively improve its deployment behavior. These results were obtained without modifying the underlying dissemination policy or accessing its parameters, presenting the practicality of the method in restricted environments, such as API deployments only.
Conclusion
In summary, research addressed the central question of adaptation of robotic policies without relying on extensive recycling or direct access to the model. By introducing a latent noise steering mechanism, the team has developed a light but powerful tool for learning the robot of the real world. The strength of the method lies in its effectiveness, stability and compatibility with existing diffusion models, making it a significant step in the deployment of adaptable robotic systems.
Discover the Paper And Project page. All the merit of this research goes to researchers in this project. Also, don't hesitate to follow us Twitter And don't forget to join our Subseubdredit 100k + ml and subscribe to Our newsletter.
Nikhil is an intern consultant at Marktechpost. It pursues a double degree integrated into materials at the Indian Kharagpur Institute of Technology. Nikhil is an IA / ML enthusiast who is still looking for applications in fields like biomaterials and biomedical sciences. With a strong experience in material science, he explores new progress and creates opportunities to contribute.
