Marine scientists have long been amazed by the way animals such as fish and seals swim so effectively despite different forms. Their bodies are optimized for effective hydrodynamic aquatic navigation, so that they can exercise minimum energy when they travel long distances.
Autonomous vehicles can derive in the ocean in the same way, collecting data on large underwater environments. However, the forms of these sliding machines are less diverse than what we find in marine life – essential conceptions often look like tubes or torpedoes, because they are also quite hydrodynamic. In addition, the test of new versions requires many real trials and errors.
Researchers from the IT and artificial MIT (CSAIL) and the University of Wisconsin in Madison's IT laboratory propose that AI could help us explore the conceptions of undeniable gliders. Their method uses automatic learning to test different 3D conceptions in a physics simulator, then shapes them in more hydrodynamic shapes. The resulting model can be made via a 3D printer using much less energy than those made by hand.
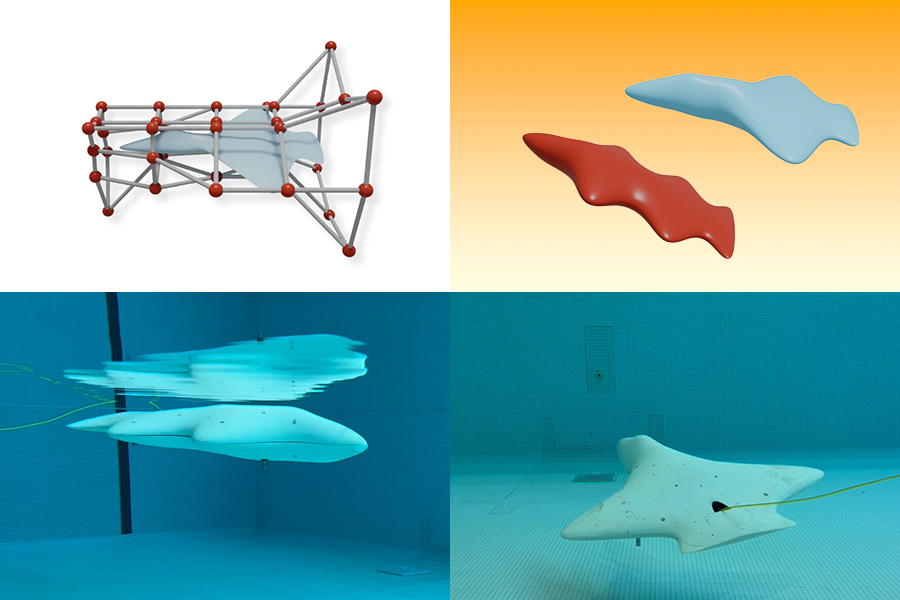
MIT scientists say that this design pipeline could create more effective new machines that help oceanographers measure water temperature and salt levels, collect more detailed information on currents and monitor climate change impacts. The team demonstrated this potential by producing two gliders about the size of a boogie board: a machine with two wings resembling an airplane, and a unique object with four wings resembling a flat fish with four fins.
Peter Yichen Chen, Mit Csail Postdoc and researcher co-directed on the project, notes that these conceptions are only some of the forms of new forms that the approach of his team can generate. “We have developed a semi-automated process that can help us test unconventional conceptions that would be very trying for humans to design,” he said. “This level of diversity of form has not been explored before, so most of these conceptions have not been tested in the real world.”
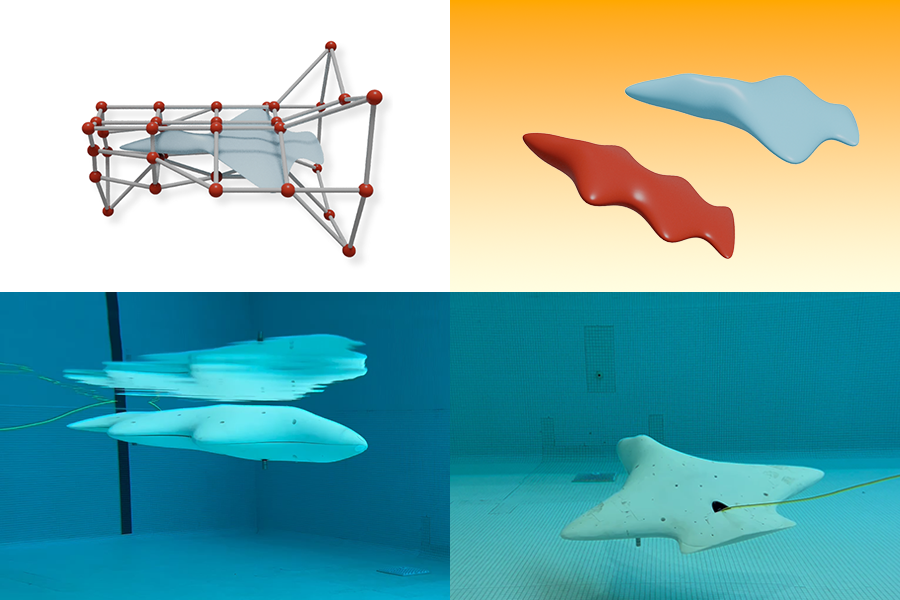
But how did the AI find these ideas in the first place? First, the researchers found 3D models of more than 20 forms of conventional sea exploration, such as submarines, whales, MANTA rays and sharks. Then, they joined these models in “deformation cages” which track down different articulation points that the researchers have drawn to create new forms.
The team led by CSAIL built a set of data from conventional and distorted forms before simulating how they would behave at different “attacking angles” – the direction that a ship will bow while it slides into the water. For example, a swimmer may want to dive at an angle of -30 degrees to recover an article from a swimming pool.
These various forms and angles of attack were then used as entries for a neural network which essentially anticipates how much a form of glider will operate effectively to particular angles and optimize it if necessary.
Give an elevator of slippery robots
The team's neural network simulates how a particular glider would react to underwater physics, aimed at capturing the way it advances and the strength that drags it. The objective: find the best gear / dragl ratio, which represents the quantity of glider which is maintained in relation to the quantity of restraint. The higher the ratio, the more effectively the vehicle moves; The lower it is, the more the glider will slow down during his trip.
The lifting / dragl ratios are essential for the flying plans: in takeoff, you want to maximize the elevator to make sure that it can slip against wind currents, and when you land, you need sufficient force to drag it to a complete stop.
Niklas Hagemann, a student graduated from MIT in architecture and affiliate of Csail, notes that this ratio is just as useful if you want a similar sliding movement in the ocean.
“Our pipeline modifies the forms of gliders to find the best elevator / drag ratio, optimizing its performance underwater,” explains Hagemann, who is also a co-directed author on a paper This was presented at the international conference on robotics and automation in June. “You can then export the most efficient conceptions so that they can be printed in 3D.”
Slide
Although their IA pipeline seems realistic, the researchers had to ensure that his predictions on the performance of the gliders were exact by experimenting in more realistic environments.
They first made their two wings design as a vehicle on a scale that looked like a paper plane. This glider was taken to Wright Brothers Wright Brothers Wright Brothers, an interior space with fans that simulate the wind flow. Placed from different angles, the reporting / drag report predicted from the glider was only about 5% higher on average than those recorded in wind experiments – a small difference between simulation and reality.
A digital assessment involving a more complex visual physics simulator also supported the idea that the pipeline AI made fairly precise predictions on how the gliders would move. He visualized the way these machines would descend in 3D.
To really assess these gliders in the real world, however, the team needed to see how their devices would manage underwater. They printed two conceptions which carried out the best at specific attack points for this test: a 9 -degree jet -shaped device and the four -wings vehicle at 30 degrees.
The two forms were made in a 3D printer in the form of hollow shells with small holes that flood when they are completely overwhelmed. This light design makes the vehicle easier to handle outside the water and requires that fewer materials are made. The researchers have placed a tube -shaped device inside these shell coverings, which housed a range of equipment, including a pump to modify the boastful buoyancy, a mass gear lever (a device that controls the machine's attack angle) and electronic components.
Each design has surpassed a torpedo -shaped glider done by hand, moving more effectively through a swimming pool. With higher lifting / dredging ratios than their counterpart, the two Machines focused on AI have exerted less energy, similar to the ways of effort in a way of marine animals navigate in the oceans.
As much as the project is a step forward encouraging for the design of gliders, researchers seek to reduce the gap between the simulation and the performance of the real world. They also hope to develop machines that can react to sudden changes in currents, which makes gliders more adaptable to seas and oceans.
Chen adds that the team seeks to explore new types of forms, in particular the designer conceptions of gliders. They intend to make their framework faster, perhaps reinforcing it with new features which allow more personalization, maneuverability or even the creation of miniature vehicles.
Chen and Hagemann co-directed research on this project with the researcher Openai Pingchuan Ma SM '23, Phd '25. They have the author of the newspaper with Wei Wang, a Wisconsin University at Madison, assistant professor and recent CSAIL Postdoc; John Romanishin '12, SM '18, Phd '23; And two MIT teachers and CSAIL members: Laboratory director Daniela Rus and the main author Wojciech Matsik. Their work was supported, in part, by a subsidy of the Defense Advanced Research Projects Agency (DARPA) and the Mit-Gist program.